
NVIDIA Jetson Xavier NX通过源码编译安装ROS2 Humble(Ubuntu20.04)
本文最后更新于 2024-09-07,当前距离文章发布(更新)已经超过365天,文章内容可能已经过时,请注意甄别。
为什么使用源码编译安装?
因为ROS2 Humble官方支持的Tier1 Ubuntu版本为22.04,20.04(Tier3)只能通过编译安装。
并且,ROS2 Foxy已经在2023年停止支持,Humble是主流的LTS(长期支持)版本。
或许你可能会问:为什么不用Docker?
那必然是纯物理环境运行有一些Docker无法提供的优势,比如可以直接使用系统已经配好的一些环境(例如深度学习需要的pytorch、torchvision,都需要用NV提供的版本)、不用进入Docker容器(调试更简单方便)等等~
写在前面
由于之前踩坑看了CSDN的旧教程半天安装不上去(后来发现是安装命令有更新),建议直接使用官方教程内的命令进行安装(本教程中有一些注意点,可以结合着看)。
如果使用本教程中提供的安装命令出现错误,请查看官方教程。
虽然Humble版本现在应该不会有什么变动了……
准备工作
在开始之前,需要确认:
已经为系统Python3更换Pypi国内镜像源
详情阅读:https://patzer0.com/archives/python-interpreter-installation-and-source-config#%E6%8D%A2%E7%94%A8%E5%9B%BD%E5%86%85%E9%95%9C%E5%83%8F 已经为系统Apt更换国内镜像源
详情阅读:https://patzer0.com/archives/simple-config-of-nvidia-jetson-xavier-nx#4.%E6%9B%B4%E6%8D%A2%E5%9B%BD%E5%86%85%E6%BA%90 已经更换系统默认Python环境为Python3
sudo apt update && sudo apt install python-is-python3 -y已经为Ubuntu配置好HTTP、HTTPS、SOCKS5代理并重启系统
添加到/etc/profile中:
http_proxy=http://your_proxy_ip:7890
https_proxy=https://your_proxy_ip:7890
all_proxy=socks5://your_proxy_ip:7890环境信息
设备:NVIDIA Jetson Xavier NX Developer Kit 8GB
系统:Ubuntu 20.04 / JetPack 5.1.3 / L4T 35.5.0
环境:Python 3.8
开始安装
确保支持UTF-8
如果你的Jetson安装系统之后没有更改过语言设置,那么不需要执行此部分操作,跳过即可。
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings添加ROS2 APT仓库
启用Universe软件源:
sudo apt install software-properties-common
sudo add-apt-repository universe之后就可以添加软件源了:
# 授权GPG密钥
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
# 添加软件源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null安装必要软件包
sudo apt update && sudo apt install -y \
python3-flake8-docstrings \
python3-pip \
python3-pytest-cov \
ros-dev-toolspython3 -m pip install -U \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-import-order \
flake8-quotes \
"pytest>=5.3" \
pytest-repeat \
pytest-rerunfailures
# 仅适用于Ubuntu20.04LTS下载ROS2源码
mkdir -p ~/ros2_humble/src
cd ~/ros2_humble
vcs import --input https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos src一般情况下,如果你的代理已经配置好但仍然不能正常下载,可以这样强制指定代理(仅限这条命令):
http_proxy=http://your_proxy_ip:7890 https_proxy=https://your_proxy_ip:7890 vcs import --input https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos src使用rosdep安装依赖
注意在Jetson平台上强烈建议非必要不执行apt upgrade,很可能会导致环境出现问题,这里注释掉。
# sudo apt upgrade # 注意在Jetson平台上强烈建议不要更新系统软件包,很可能会导致环境出现问题
sudo rosdep init
rosdep update
如果你的rosdep没有正确读取你的代理配置(表现为xxx Timeout),也可以强制指定代理:
http_proxy=http://your_proxy_ip:7890 https_proxy=https://your_proxy_ip:7890 rosdep update正常的输出类似:
reading in sources list data from /etc/ros/rosdep/sources.list.d
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent" #跳过了一些已经终止支持的版本
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Skip end-of-life distro "foxy"
Skip end-of-life distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble" #增加了当前仍然支持的版本
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Add distro "iron"
Skip end-of-life distro "jade"
Add distro "jazzy"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Skip end-of-life distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/jetson/.ros/rosdep/sources.cache安装软件包:
rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"这条命令会传递需要安装的软件包调用apt进行安装,一般情况下不需要指定代理。
此过程会消耗较多时间(有非常多软件包需要安装),请耐心等待。
当你看到#All required rosdeps installed successfully就代表所需软件包安装完成,可以继续了。

构建代码
cd ~/ros2_humble/
colcon build --symlink-install编译过程也需要比较长的时间……毕竟是Tier3系统版本,为了装Humble也只能等一下了~
闲得慌可以开个jtop看CPU旋转4小时
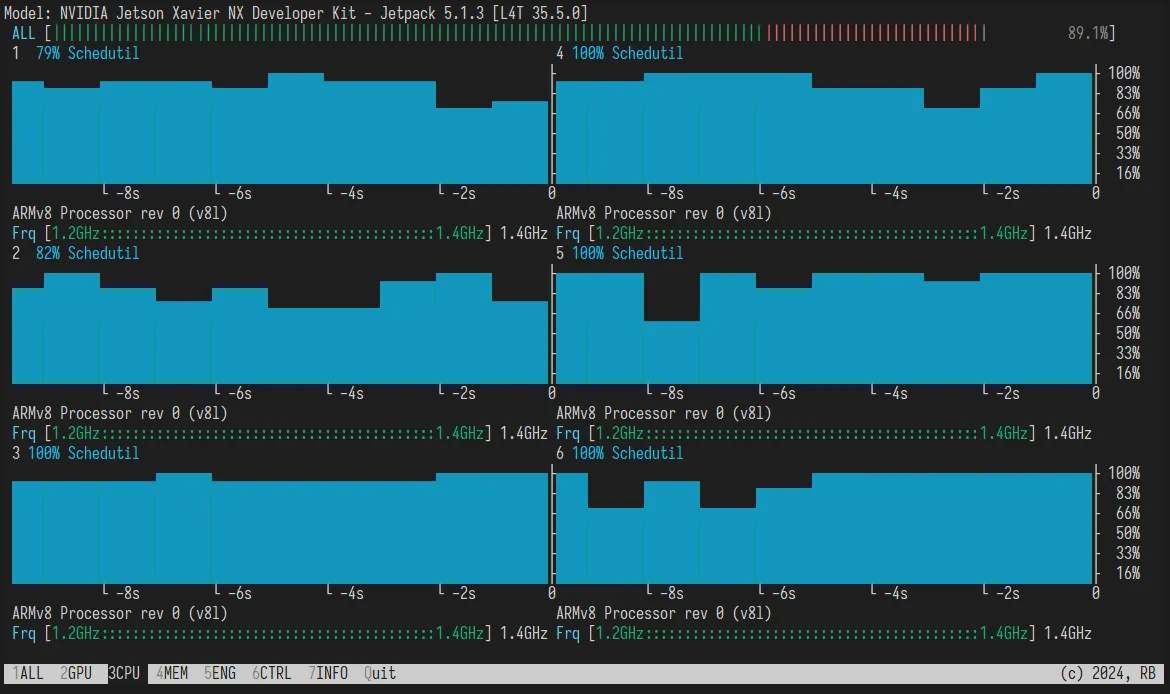
在Xavier NX上最终编译耗时4小时21分钟。

配置环境
echo ". ~/ros2_humble/install/local_setup.bash" >> ~/.bashrc
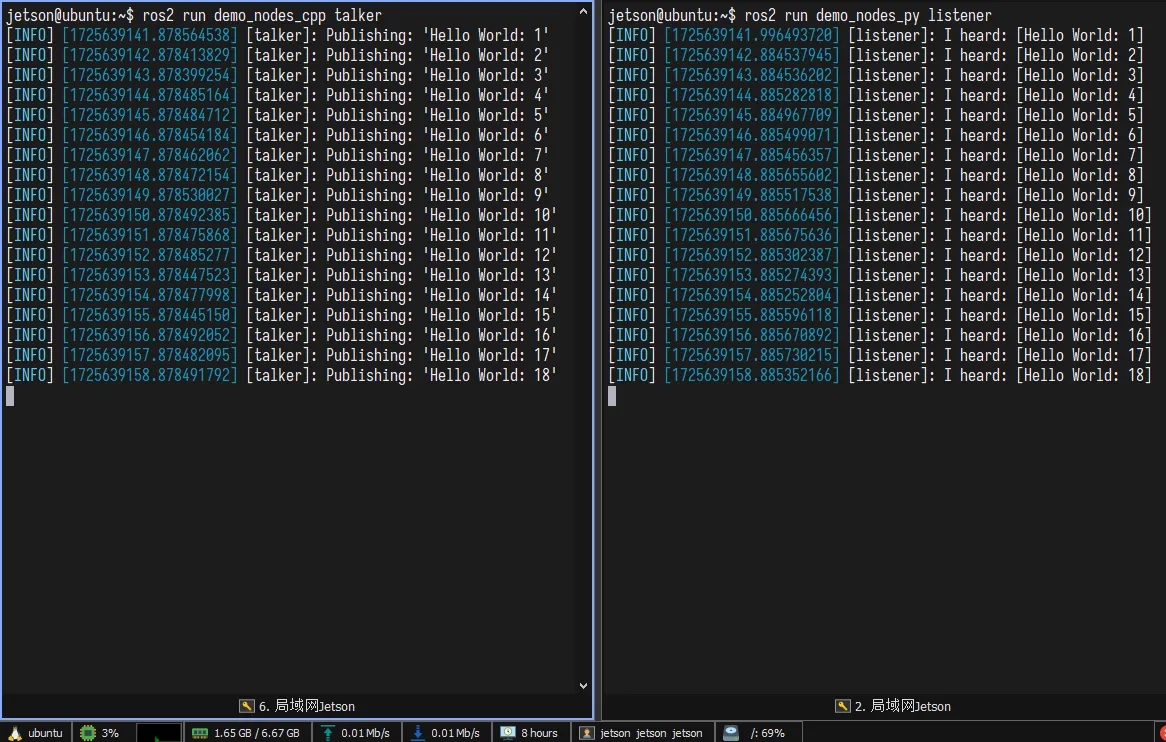
source ~/.bashrc接下来就可以正常使用ROS2了,开两个终端来测试一下:
Listener:
ros2 run demo_nodes_py listenerTalker:
ros2 run demo_nodes_cpp talker测试Listener成功接收Talker的信息,大功告成~
- 感谢你赐予我前进的力量
-
 微信
微信  支付宝
支付宝


.webp)


